FANUC Robotics’ WinOLPC is a robot program development software designed for FANUC SYSTEM R-J3 RIA robots. This software provides the tools to develop KAREL or Teach Pendant Programs (TPP) off-line on a PC.
Features/Benefits
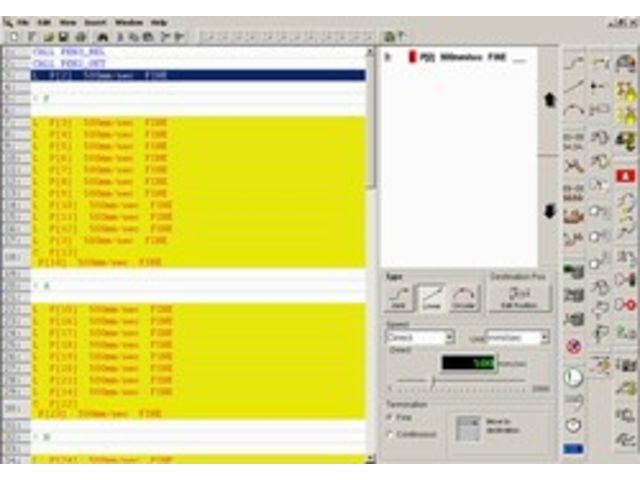
Graphical TPP Editor (WinTPE)\
WinTPE is used to view, create and edit R-J3 teach pendant programs off-line. This allows users to write the application before robot installation or to leave existing robots in production.
Graphical user interface is easy to use for anyone familiar with FANUC robot teach pendant programming. No additional training is required to use the Graphical TPP Editor.
WinOLPC and WinOLPC+ is fully compatible with Microsoft Windows 95/98/NT/2000 operating systems including menus, toolbars and multiple document editing environments.
European language support is available for menus.
Online help provides descriptions for all instructions in FANUC robot teach pendant programming.
Configurable template buttons for commonly used program segments make it easy to insert frequently used TPP lines.
Main edit window with instruction-specific color scheme provides users with a user-friendly interface for editing robot programs.
Powerful drag-and-drop, cut/copy/paste and multiple line editing for motion speed and other parameters make the TPP Editor simple to use.
Online capability (available only for R-J3 robots loaded with the PC Interface Option) allows users to connect to multiple robots and edit programs directly on the robot controller. Users can monitor robot programs as they execute.
Instruction toolbars allow new instructions to be taught quickly.
TPP Translator
Allows the user to convert a binary. TP file to an ASCII text file for editing or printing.
Allows edited ASCII text files to be converted back into. TP files and loaded into a robot.
KAREL Translator
This tool allows users to edit KAREL programs with Notepad (or any other text editor) and compile them for use on a robot.
Dictionary processor allows the programmer to develop teach pendant user interfaces specific to an application.
Variable editor allows users to edit system variables or KAREL variables off-line.
A preview version of KAREL Development Environment (KLIDE) provides Microsoft Office Suite type of programming environment for KAREL programmers (requires code writing software not included with KLIDE).
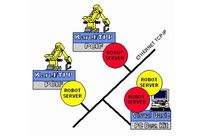
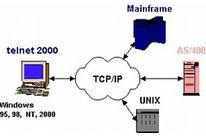
File Transfer
Network file transfer feature allows the transfer of robot programs or data from the PC to robots; robot to other robots; or from a PC to another PC via Ethernet.
Floppy emulation software is included with WinOLPC to support file transfer between a PC and robot via RS-232 serial link.
Additional Features Included with WinOLPC+
Option
The new 3-D Node Map feature available only with WinOLPC+ provides the ability to graphically edit Teach Pendant Programs in a 3-D virtual robot work cell.
CNC program import (available only WinOLPC+) allows user to import CNC programs and position information from generic text files.
3-D Node Map (Available with WinOLPC+ only)
Provides the user with a 3-D environment for viewing, editing and teaching teach
pendant programs.
Allows users to import 3-D CAD files for parts and robot tooling in the workcell.
Imported parts and tooling may be saved with workcell save/load mechanism.
Positions may be taught or “touched up” on any imported CAD part.
Fully interactive environment interfaced with the Graphical
TPP Editor.
Motion types highlighted in color for better display clarity.
Workcell Calibration Wizard allows offline paths to be calibrated to the actual robot workcell.
Shift/adjust toolbox allows points to be shifted in the user, tool or path frames.
Discrete process instructions (such as SpotTool’s SPOT) are highlighted with special nodes for easy identification.
Continuous process areas (such as in painting, sealing and arc welding) are highlighted and may be shown with a virtual “process surface.”
Node Maps may be printed and saved for future use.
Supports common entities of IGES, DXF and VRML CAD files.
PC Requirements
Minimum requirements to install and run WinOLPC:
Pentium II 266 Mhz
64MB RAM
128MB of RAM to use the 3-D Node Map option. Importing large CAD files may require additional RAM.
150MB free disk space
Microsoft™ Windows 2000, NT 4.0 or Windows 95/98
Microsoft™ IE 4.x or greater with Java Virtual Machine component installed
Dial-Up Networking
VGA (640x480) 256-color display capability
Microsoft™-compatible pointing device